
 Hey Guys,
Hey Guys,
It’s been a while since I posted an update on SAGAR, but here’s the latest.
I wanted her to go faster. My original motors would only do about 1.2 m/s tops. Well, with a little help from a friend, I found new motors that would bring up the top speed to well over 3 m/s. However, they require more current to reach that speed, more then my original controller could handle. So it had to be replaced.

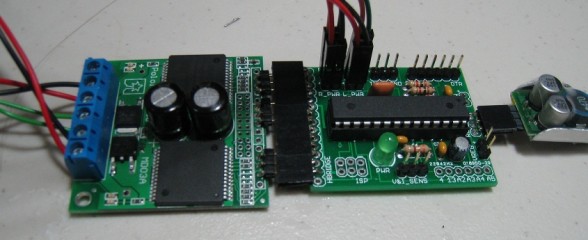
 Part 2 of my documenting of my robot project focuses on the just completed “Smart Motor Controller”. I call it a smart controller because, unlike other motor controllers on the market, mine utilizes feedback from the motors to precisely set wheel speeds and report back how far the robot has traveled.The brain of the controller is an Arduino Pro mini, pictured in this post. The actually driver H-bridge is a Ardumoto from SparkFun.
Part 2 of my documenting of my robot project focuses on the just completed “Smart Motor Controller”. I call it a smart controller because, unlike other motor controllers on the market, mine utilizes feedback from the motors to precisely set wheel speeds and report back how far the robot has traveled.The brain of the controller is an Arduino Pro mini, pictured in this post. The actually driver H-bridge is a Ardumoto from SparkFun.