
 Hey Guys,
Hey Guys,
It’s been a while since I posted an update on SAGAR, but here’s the latest.
I wanted her to go faster. My original motors would only do about 1.2 m/s tops. Well, with a little help from a friend, I found new motors that would bring up the top speed to well over 3 m/s. However, they require more current to reach that speed, more then my original controller could handle. So it had to be replaced.

My SAGAR project has gotten to a point where I would like to document the system design through a series of detailed posts.
First I’ll show the new interface, and talk about how it communicates with SAGAR.
 In a joint effort between my girlfriend and I, SAGAR now has a super fancy LabView based graphical user interface. The video below is a screen capture of the interface as SAGAR runs a mission taking it around a parking lot. All communications are in the form of NMEA sentences. The DIYdrones ground station gave us a few ideas of what we wanted to do.
In a joint effort between my girlfriend and I, SAGAR now has a super fancy LabView based graphical user interface. The video below is a screen capture of the interface as SAGAR runs a mission taking it around a parking lot. All communications are in the form of NMEA sentences. The DIYdrones ground station gave us a few ideas of what we wanted to do.
 Ok, so I’m a little overexcited. I just got back from watching SAGAR complete it’s first autonomous mission. I just finished coding the navigation functions and couldn’t wait till the next day to test. Attached is an image of the mission it ran.
Ok, so I’m a little overexcited. I just got back from watching SAGAR complete it’s first autonomous mission. I just finished coding the navigation functions and couldn’t wait till the next day to test. Attached is an image of the mission it ran.
I used a Ardupilot program to generate the mission file with waypoints, convert it to a hex file using gcc, and I manually flash that into the Axon’s EEPROM memory. When SAGAR comes online, I give it a command to scan the mission file in memory, then I command it to run the mission.
 I have been asked by a few people how SAGAR is going, so I guess I need to do some updates more often. Anyway, SAGAR was shelved for a while. The last tests of the closed loop heading controller showed I had something messing with the compass readings. Further tests concluded that my batteries were biasing my compass.
I have been asked by a few people how SAGAR is going, so I guess I need to do some updates more often. Anyway, SAGAR was shelved for a while. The last tests of the closed loop heading controller showed I had something messing with the compass readings. Further tests concluded that my batteries were biasing my compass.
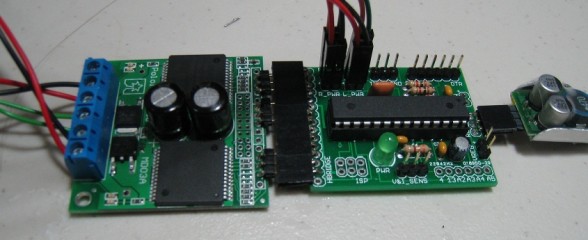
 Part 2 of my documenting of my robot project focuses on the just completed “Smart Motor Controller”. I call it a smart controller because, unlike other motor controllers on the market, mine utilizes feedback from the motors to precisely set wheel speeds and report back how far the robot has traveled.The brain of the controller is an Arduino Pro mini, pictured in this post. The actually driver H-bridge is a Ardumoto from SparkFun.
Part 2 of my documenting of my robot project focuses on the just completed “Smart Motor Controller”. I call it a smart controller because, unlike other motor controllers on the market, mine utilizes feedback from the motors to precisely set wheel speeds and report back how far the robot has traveled.The brain of the controller is an Arduino Pro mini, pictured in this post. The actually driver H-bridge is a Ardumoto from SparkFun.

Well, I finally have gotten around to posting about my current project, Sagar! (The name might be changed if i come up with a better one) Basically, in an effort to better understand the technology I use at my job in the Navy, I am building a robot from scratch. My hope is in the end to have a robot that can be driven remotely, or drive itself with the aid of a GPS and inertial navigation system as well as avoid obstacles and reroute around them. I want it to be able to ‘record’ a route while being driven remotely, then be able to ‘replay’ the path without any assistance.